CAN FD-기본 아이디어
자동차 산업의 대역폭 요구사항으로 인해 CAN 데이터 링크 계층 프로토콜을 개선해야 했습니다. 2011 년에 Bosch는 자동차 제조업체 및 기타 CAN 전문가와 긴밀히 협력하여 CAN FD (유연한 데이터 속도) 개발을 시작했습니다. 개선 된 프로토콜은 CAN 한계를 극복합니다. 1Mbit / s보다 빠르게 데이터를 전송할 수 있으며 페이로드 (데이터 필드)는 이제 최대 64바이트 길이이며 더 이상 8바이트로 제한되지 않습니다. 일반적으로 아이디어는 간단합니다. 하나의 노드 만 전송하는 경우 노드를 동기화할 필요가 없기 때문에 비트 전송률을 높일 수 있습니다. 물론, ACK 슬롯 비트를 전송하기 전에 노드를 재 동기화 해야 합니다.

CAN FD 데이터 프레임은 두 가지 다른 비트 전송률로 전송될 수 있습니다. 중재 단계에서 비트 전송률은 네트워크 토폴로지에 따라 달라지며 1Mbit / s로 제한됩니다. 데이터 단계에서 비트 전송률은 트랜시버 특성에 의해 제한됩니다.
중재 및 데이터 단계에서 비트 전송률에 1 : 8 비율을 사용하면 CAN FD 프레임이 헤더 (제어 필드) 및 CRC 필드에서 더 많은 비트를 사용한다는 점을 고려할 때 처리량이 약 6배 높아집니다.
더 빠르고 더 오래 : 더 큰 페이로드는 프로토콜 효율성을 개선하고 더 높은 처리량으로 이어집니다.
CAN FD – 일부 프로토콜 세부 사항
클래식 데이터 프레임과 CAN FD 데이터 프레임을 구별하기 위해 이전에 예약된 비트 중 하나가 사용됩니다. 이 비트를 FDF (FD 프레임) 비트라고 합니다. 열성 값인 경우 다음 비트 시퀀스는 CAN FD 데이터 프레임으로 해석됩니다. 우세한 가치라면 클래식 데이터 또는 원격 프레임입니다. 새롭게 도입 된 BRS (비트 레이트 스위치) 비트는 열성 (r) 값일 때 두 번째 비트 레이트가 적용됩니다. 지배적 (d) 값인 경우 데이터 단계에서도 중재 단계 비트 시간 설정이 사용됩니다.

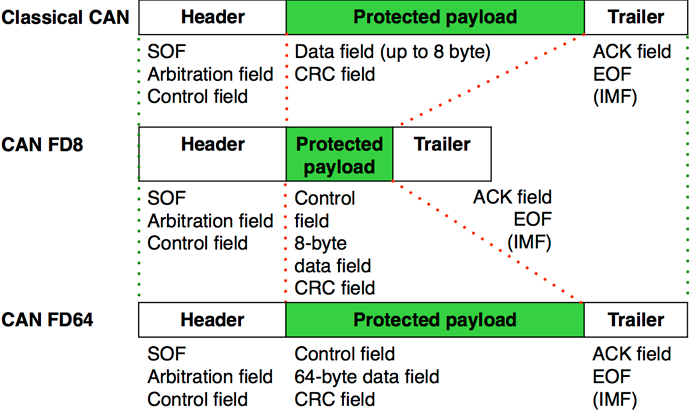
CAN FD 데이터 프레임의 구조 : 필드는 기존 CAN 데이터 프레임과 동일 하지만 일부 확장이 도입되었습니다 (* stuff-bit는 고려되지 않음, ** 고정 stuff-bit 사용).
SOF = 프레임 시작, CRC = 순환 중복 검사, ACK = 승인, EOF = 프레임 끝, IMF = 중단 필드
CAN FD 프로토콜 컨트롤러는 기존 CAN 프레임도 지원해야 합니다. 두 CAN 프로토콜 (클래식 및 CAN FD)은 ISO 11898-1 : 2015에서 국제적으로 표준화되었습니다. 11 비트 식별자가 있는 CAN FD 데이터 프레임은 FBFF (FD 기본 프레임 형식)를 사용하고 29 비트 식별자가있는 데이터 프레임은 FEFF (FD 확장 프레임 형식)를 사용합니다. CAN FD 프로토콜은 원격 요청 된 데이터 프레임을 지원하지 않습니다.
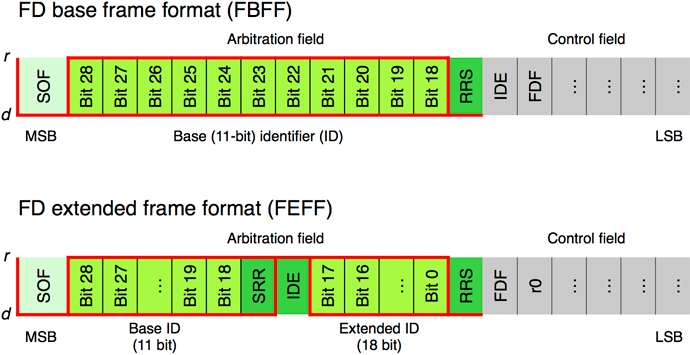
두 가지 CAN FD 프레임 형식 : IDE 비트는 FEFF에서 열성이고 RRS 비트는 항상 우세하며 SRR 비트의 값은 중요하지 않습니다.
RRS = 원격 요청 대체, SRR = 원격 요청 대체, IDE = 식별자 확장, FDF = 유연한 데이터 속도 형식, d = 우세, r = 열성, r0 = 예약 됨
제어 필드는 클래식 CAN 데이터 프레임에서 제공하지 않는 추가 비트를 포함합니다. FDF (FD 형식) 비트는 FD 프레임 형식의 사용을 나타냅니다. BRS (비트 레이트 전환) 비트의 샘플 포인트에서 비트 레이트 전환이 수행됩니다. 이것은 최대의 견고성을 보장합니다. 다음 ESI (오류 상태 표시기) 비트는 오류 상태에 대한 정보를 제공합니다. 지배적인 값은 오류 활성 상태를 나타냅니다.

확장 된 제어 필드 : Classical CAN 프로토콜에서 사용하지 않는 DLC (데이터 길이 코드) 값은 CAN FD 프로토콜에서 사용되는 것으로 표시됩니다.
IDE (식별자 확장), FDF (유연한 데이터 전송률 형식), BRS (비트 전송률 스위치, 열성, 대체 비트 전송률인 경우), ESI (오류 상태 표시기, 열성, 오류 수동적인 경우)
CAN FD 프로토콜의 표준화 프로세스 동안 통신 신뢰성을 향상시키기 위해 몇 가지 추가 안전 가드가 도입되었습니다. 이것이 CRC 필드가 17 비트 (최대 16 바이트의 페이로드가있는 프레임의 경우) 또는 21 비트 (16 바이트보다 큰 프레임의 경우) 다항식과 8 비트 스터프 비트 카운터와 패리티 비트로 구성되는 이유입니다. CRC 필드는 이전 비트의 반대 값을 가진 고정 재료 비트 (FSB)를 사용합니다. 이러한 모든 안전 가드는 모든 조건에서 모든 단일 오류가 감지되도록 보장합니다. 여러 오류를 감지할 수 있는 가능성도 향상되었습니다.
ISO 11898-1 표준을 준수하지 않는 중기 비 ISO CAN FD 컨트롤러도 시장에 출시될 수 있습니다. 위에서 언급한 추가 안전 가드 기능을 구현하지 않습니다.
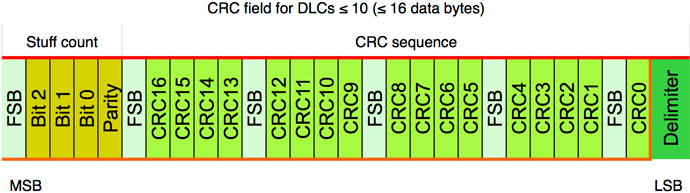
Stuff-bit 카운터 : 3 비트 stuff-bit 카운터는 회색으로 코딩되어 있으며 패리티 비트와 다음 FBS (Fixed Stuff-bit)에 의해 보호됩니다.
'자동차 관련 기술' 카테고리의 다른 글
| 베어링 고장 기계적 마모 원인 bearing damage fail Flaking spalling (0) | 2021.04.14 |
|---|---|
| CAN 통신 역사 History 배경 진화 (1) | 2021.02.22 |
| 연료 전지 시스템 수소 셀 스택 Fuel Cell Stack (3) | 2021.01.05 |
| 무선 전기차 충전소 (WEVCS) 기술 (3) | 2021.01.03 |
| 연료 전지 전기 자동차 FCEV 구성 요소 및 원리 (3) | 2020.12.29 |